

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于无控技术的海岸带影像图构建与应用
[陈洁1, 2  , 李京
, 李京1 , 李奇1 , 李天祺1 ]
, 李京|
|


第一作者简介: 陈洁(1980—),男,硕士,高级工程师,主要从事航空遥感技术方法、高光谱遥感信息模型及应用、环境遥感和地质工程等方面的研究。Email: 6592296@qq.com。
运用直接地理定位技术和大幅面航空数字摄影系统的紧密捷联,开展渤海湾西部天津滨海新区和唐山曹妃甸新区的高精度航空遥感调查工作。无地面控制点技术的应用摆脱了航空遥感对基站的依赖,也克服了海岸带周边地区地面基站稀少的局限。利用获取的0.3 m高空间分辨率真彩色航摄影像和高精度定位定向元素,成功构建了平面与高程均符合1:10 000比例尺指标要求的数字高程模型(digital elevation model,DEM)和数字正射影像图(digital orthophoto map,DOM),填补了天津滨海新区和唐山曹妃甸新区海岸带潮间带高精度航空遥感基础地质信息的空白,同时结合高分卫星数据,在土地类型分类、海岸线提取等方面开展了遥感解译应用,为进行遥感地质解译、地质生态环境与灾害等要素的专题图制作提供详实可靠的地理信息基础数据。研究结果显示,紧耦合机载定位定向系统(position and orientation system,POS)无控技术的运用缩短了DEM和DOM成图作业周期,减少了大量地面测量工作,节约了人力和物力支出,为海岸带工作区开展地质调查提供了新的技术支撑和工作思路。
Using the tight connection of direct geolocation technique and large-scale digital aerial photography system, the authors carried out the high-precision aerial remote sensing survey in Binhai New Area of Tianjin and Caofeidian New Area of Tangshan, West Bohai Bay. The application of uncontrolled point technology gets rid of the dependence on the base station for aerial remote sensing, and also overcomes the shortcoming of the rarity of ground stations in the surrounding areas of the coastal zone. Utilizing the 0.3 m high-resolution true-color aerial photography images and high-precision positioning and orientation elements, the authors have successfully constructed the Digital Elevation Model (DEM) and Digital Orthophoto Map (DOM), which meet the requirements of 1:10 000 scale indexes in plane and altitude. These fill the gap in the basic geological information of high-precision aerial remote sensing in Binhai New Area and the intertidal belt of Caofeidian Coastal Zone. On the basis of high-resolution satellite data, remote sensing interpretation has been used for land type classification and coastline extraction, which provides detailed and reliable geographic information for the thematic maps of remote sensing geological interpretation, geological ecological environment and disasters. The results show that the application of tightly coupled airborne position and orientation system (POS) and uncontrolled technology shortens the mapping cycle of DEM and DOM, reduces a lot of ground measurement workload and saves manpower and material expenditure. The research can provide some new technical support and working ideas for geological survey in coastal zone working areas.
海岸带是指在海陆之间相互作用的地带, 海岸带地貌复杂, 既有海洋水体, 又有湿地、滩涂、海岸线以及陆地人文地物, 受潮汐影响变化难测, 应用传统的地面测量工作量巨大, 且不易寻找明显的地物特征点, 船载测量由于近岸水位的原因不能开展测量工作, 因此造成了“ 人下不去、船上不来” 的两难境地, 无法完成陆地与海洋的一体化无缝接图, 所以目前潮间带地区地质调查基础资料匮乏, 工作仍处于起步阶段。遥感技术具有覆盖范围广、时空尺度多样、光谱信息丰富、观测灵活等优点, 已成为海岸带地质调查的重要手段。李秀梅等[1]和石国印等[2]利用卫星影像数据在渤海海岸带进行了土地利用类型分类和海岸线提取的研究; 李清泉等[3]和梁立等[4]总结归纳了基于遥感影像技术的海岸带监测和海岸线提取方法。上述研究的数据源均为卫星影像, 由于卫星轨道与海岸线走向不一致, 解译前需先进行多源多时相数据的融合与镶嵌, 由于卫星类型与数据格式的不同, 还需采用不同的模型算法进行大气校正、几何纠正与辐射定标等预处理工作, 算法的选择也因人而异, 造成了最终解译底图的不一致性。
以飞机为载体的航空遥感调查不受这些因素影响, 具有卫星数据无法比拟的优势。飞行平台上搭载的光学相机、高(多)光谱成像仪、地形激光雷达、水深激光测深雷达和合成孔径雷达等类型传感器, 涵盖了多个电磁波谱段, 合理利用这些技术手段既可以得到详实准确的高空间分辨率影像数据(多优于0.3 m), 分析地质现象的空间分布格局, 还可以提供地形地貌、地物分类和统计等方面的定性及定量地理信息, 有助于建立岛礁、海洋和陆地的地质模型, 为研究海陆地质耦合关系提供宏观的基础底图。对于数字航空摄影与测量技术来说, 目前可获取到地表目标高达厘米级的空间分辨率信息, 随着机载定位定向系统(position and orientation system, POS)技术的日益成熟和发展, 无地面控制的定位精度已完全满足中比例尺成果图件生产, 但其前提是架设地面基站, 这在明显特征地物少、工作区呈狭长形的海岸带地区可操作性不高。而精密单点定位(precise point position, PPP)技术利用GNSS卫星广播的星历作为坐标起算数据, 使用精密卫星钟差来替代用户观测到的卫星钟差参数, 使得仅依靠一台双频双码接收机即可进行分米级的动态定位或厘米级的快速静态观测[5], 采用PPP技术的结果在尺度上是紧耦合方式的1/3~1/2, 但其精度仍符合1:10 000比例尺制图的相关指标要求[6], 这种级别的精度指标已经完全可以满足大范围、宏观的地质地貌分析及应用的要求, 特别适用于某些工作人员无法进入、地质灾害过后的困难地区及海洋[7]、沙漠、戈壁等特征地物较少的区域; 航线规划可根据海岸线走向进行设计, 飞行时间可参考常年的潮汐变化特征, 选择恰当的时刻进行作业飞行, 获取接近真实情况的最高潮、最低潮和平均潮位的影像数据。因此, 航空遥感与PPP技术结合, 使基于无控技术的海岸带影像构建成为可能。
研究区主要位于渤海湾西部天津滨海新区和唐山曹妃甸新区, 该区是渤海经济发展的重要区域, 覆盖面积为6 300 km2。天津滨海新区位于渤海湾顶端, 在山东半岛与辽东半岛交汇处、海河流域下游、天津市东面, 毗邻渤海, 辖区内海岸线长153 km, 陆域面积为2 270 km2, 海域面积为3 000 km2。唐山曹妃甸新区位于渤海中心, 唐山南部, 毗邻北京、天津两大城市。对研究区进行航空遥感数据采集与影像图制作具有现实意义。
地质背景方面, 天津滨海新区属华北地层大区的华北平原分区, 位于断陷坳陷盆地, 新生代堆积物沉积厚, 前新生代地层与区域地层发育情况基本相同。该区域构造处在华北断坳二级构造单元中, 位于黄骅坳陷三级构造单元的北部, 自北东至南西分别涉及宁河凸起、北塘凹陷、板桥凹陷和歧口凹陷4个四级构造单元, 接近黄骅坳陷的沉降中心[8]。唐山曹妃甸新区是因滦河北移而形成的条状沙岛海滩, 位于古滦河三角洲前缘, 距大陆海岸线约20 km。滩外侧为古滦河冲积扇陡坎, 甸头前缘500~600 m处水深达到20~30 m, 构成渤海湾内天然的深水港址; 滩内侧为海水淹没的古滦河冲积扇体, 上部覆盖海相沉积, 与陆地之间均为宽阔的浅滩, 地形比较平坦, 海水高潮时显露面积为4 km2, 低潮时显露面积为20 km2, 海底地面标高在-0.5~0.7 m之间, 北浅南深逐渐变大[9]。由此可见, 该研究区内的第四纪地质地貌特征较为发育[10], 通过航空摄影得到的高空间分辨率影像数据, 可为下一阶段的地质调查打下良好的基础, 具有较高的研究价值。
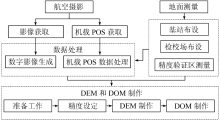
紧耦合机载POS系统, 摆脱了传统松散型机载POS对地面基站距离和飞行期间飞行平台姿态的限制, 可直接利用其获取的机载POS数据, 通过检校场消除系统误差后, 得到的6个外方位元素进行空中三角测量和数字高程模型(digital elevation model, DEM)与数字正射影像(digital orthophoto map, DOM)的成果制作, 无需进行地面控制点的测量, 极大地缩短了作业周期, 节约了人力和物力支出, 该方式称之为直接地理定位定向技术。在本研究中采用的紧耦合机载POS技术不仅可利用地面基站进行联合差分运算, 还可利用快速星历文件进行精密的单点定位成果输出, 其精度在高差不大的地区, 仍可满足中小比例尺技术规范要求, 而海岸带地区的平坦地势为PPP技术的优势发挥提供了良好的解算背景。具体技术流程如图1所示。
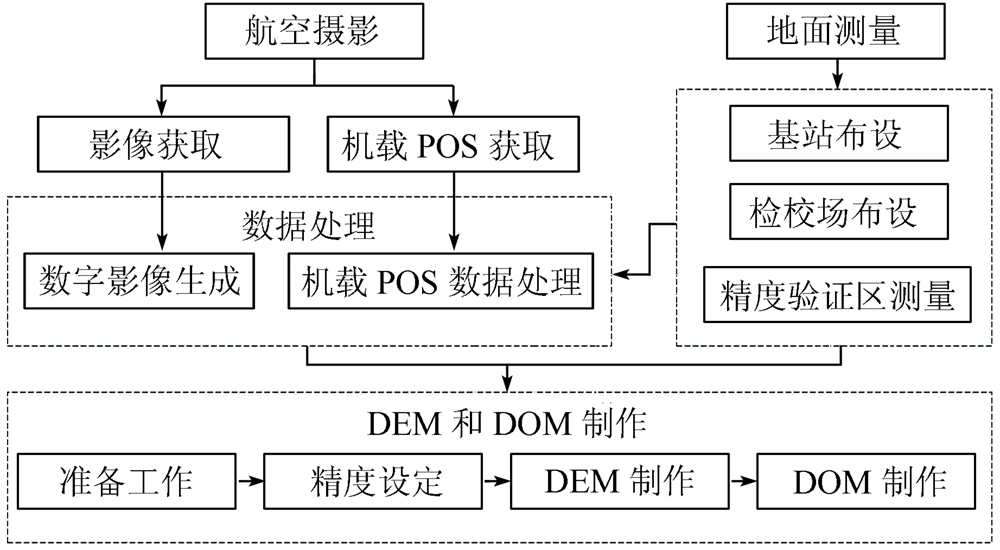 | 图1 基于机载POS技术的DEM和DOM成果制作流程Fig.1 Flowchart of DEM and DOM achievement production based on airborne POS technology |
本次飞行采用的传感器为DMC数字航空摄影仪, 并配备了AEROcontrol IID型惯性测量单元, 可同步获取机载POS数据。2016年6月2日— 11月2日共执行了10个架次的飞行任务, 累计完成39条测线, 获取了3 325张数字影像, 其中包括检校场航线2条, 飞行高度为3 000 m, 同时完成了机载POS数据的获取。最终实际获取天津滨海新区和唐山曹妃甸新区8 332 km2的真彩色航空遥感影像数据, 地面分辨率优于0.3 m。
2.2.1 基站布设
根据《IMU/GPS辅助航空摄影技术规范》中基站选址原则, 结合研究区内实际情况, 选择附近无电波干扰、无水面和强反射地物、无电磁波强辐射源、无高压输电线和无微波无线电信号传送通道的开阔处为基站观测点, 经现场踏勘, 基准站选定于天津市东丽区恒大名都小区东北角小区花园内, 点名为TJJZ。该站点附近交通、通讯条件良好, 便于联络和数据传输。
2.2.2 检校场布设
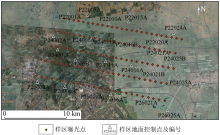
检校场位于曹妃甸新区滨海镇, 选择2条相邻航线, 每条航线11张曝光点, 在每条航线的第3、6、9张航片的六度重叠区域布设、选刺检校点, 检校场共布设、联测6个检校点, 另在检校场内布设、联测2个同精度检查点, 在每个控制点位上实施GPS静态定位测量, 观测时做详细的控制点点之记。检校场实际点位如图2所示。
 | 图2 检校场地面控制点分布示意图Fig.2 Ground control points distribution of calibration field |
2.2.3 精度验证区测量
精度验证区选在航摄区精度最弱的区域, 即距离基站最远的区域, 共均匀布设24个精度验证区控制点。按照GB/T 13977— 2012中规定的像片控制测量技术要求, 在每个验证区控制点位上采用RTK测量方法, 拍摄现场照片, 做详细的地面控制点点之记, 以标明点位名称、所在地和点位略图等信息, 控制点采用统一编号。精度验证区实际点位分布如图3所示。
 | 图3 精度验证区地面控制点分布示意图Fig.3 Ground control points distribution of accuracy verification area |
2.3.1 数字影像生成
采用DMC配套软件对DMC数字影像进行数据下载、影像预处理、影像调色、几何纠正和辐射校正, 最终输出真彩色数字影像。
2.3.2 机载POS数据处理
(1)POS数据预处理。下载地面基站同步观测数据、机载POS数据。利用惯导厂商提供的软件对数据进行预处理, 得到每个曝光点的机载惯导和GNSS初始观测值。根据航摄飞行记录, 将曝光点的实际编号与设计编号一一对应。
(2)载波相位差分计算。利用基站同步观测数据、机载观测数据、精密星历进行载波相位差分解算, 得到每一个采样间隔的机载GNSS天线相位中心的坐标成果。
(3)POS数据后处理。利用所得到的天线相位中心坐标观测值和惯导数据观测值, 引入飞行前所量测的偏心分量值, 进行POS数据后处理, 得到包括检校场在内的每个曝光点的未检校的外方位元素值。
(4)检校场计算。采用传统的空中三角测量方法, 引入检校场的6个地面平高控制点, 得到检校场每个曝光点的外方位元素成果, 该套数据可视为真值。与POS数据后处理得到的检校场外方位元素进行比较分析, 采用严密数学检校方法, 得到检校参数, 即偏心角值。
(5)高精度外方位元素解算及输出。利用上一步骤得到的偏心角值对该架次的所有曝光点进行系统检校改正, 得到更高精度的外方位元素, 并将成果转换为所需坐标系。在飞行高度相同、作业时间跨度不大的情况下, 可利用该偏心角值对测区其他架次飞行数据依次处理, 以得到整个测区所有曝光点的外方位元素成果。
利用经过了系统检校后的高精度外方位元素成果直接恢复立体, 即基于直接地理定位定向技术进行研究区的DEM和DOM数据制作, 并开展成果评价与精度验证以确保成果质量, 在卫星遥感数据解译的基础上利用该航空遥感数据开展更精细化的地质调查工作。
2.4.1 准备工作
需要准备的资料包括影像数据、地面点刺点片、控制点成果和仪器设备参数等。在航空摄影测量软件中导入上述数据后, 首先, 利用数字航摄的仪器参数进行自动影像内定向与相对定向; 然后, 量测像控点并进行绝对定向; 最后, 运用光束法加密出模型匹配点(加密点)的坐标。
2.4.2 精度设定
该步骤是根据成果图件的比例尺来设定摄影测量解算的约束值, 一般分为内定向和相对定向2部分, 内定向的目的是将拍摄的影像纠正到像片坐标系, 数字影像由许多像元组成, 成像时的相对位置稳定, 因此不需要内定向环节。相对定向时, 模型连接点残余上下视差中误差不大于1/3个像元, 连接点上下视差最大残差不大于2/3个像元[11]。
2.4.3 DEM制作
利用数字航空遥感影像和经检校过的外方位元素数据, 通过空中三角测量技术解求每个模型定向点成果。利用空三加密成果, 在数字摄影测量工作站上采集DEM数据, 编辑输出进行正射校正的高程数据。DEM数据经分幅、裁剪和整理, 生产出以图幅为存储单元的数据, 数据格式采用标准tiff格式。DEM数据覆盖整个研究区范围, 接边范围数据要有一定的重叠。DEM数据制作按《基础地理信息数字成果1:5 000、1:10 000、1:25 000、1:50 000、1:100 000数字高程模型》(CH/T 9009.2— 2010)等标准中的相关要求执行[12]。
2.4.4 DOM制作
利用生成的DEM数据和空三测量数据在专业软件支持下对原始影像进行正射校正, 再进行影像的镶嵌和裁剪, 相邻DOM数据镶嵌处的接边限差不大于2个像元。图幅间DOM数据要求纹理接边, 影像颜色保持一致。DOM数据应连续完整, 地物清晰, 色调均匀, 反差适中, 无重影、模糊或纹理断裂等现象。DOM元数据按图幅进行录入, 数据格式为非压缩的tiff格式, 并以图幅编号命名。DOM数据制作按《基础地理信息数字成果1:5 000、1:10 000、1:25 000、1:50 000, 1:100 000 数字正射影像图》(CH/T 9009.3— 2010)等标准中相关要求执行[13]。
3.1.1 航线弯曲度
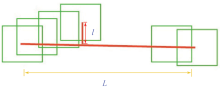
航摄时由于不稳定气流的影响, 飞行轨迹并不是一条直线, 将实际曝光点的点位连接起来可得到一条弯曲的折线。如图4所示, L为连接首末两端影像像主点的直线长度, m; l为偏离直线L最远的像主点与该直线的距离, m。航线的弯曲度C为航线弯曲的最大矢量与航线长度比值的百分数, 即
当弯曲度太大时会产生航线的旁向漏洞, 增加航测内业困难, 影响航测加密精度。规范规定航线弯曲度一般不大于1%, 当航线长度小于5 000 m时, 航线弯曲度最大不大于3%。
 | 图4 航线弯曲度示意图Fig.4 Schematic of flightline curvature |
本研究采用的DMC航空摄影仪具有自动化程度较高的飞行管理系统, 能够实时监控飞行偏移距离, 飞行平台上也集成了高精度的GPS导航系统, 具有自动驾驶功能。在实际作业时, 通过航摄员与飞行员的实时监测与沟通, 确保了所有架次的飞行轨迹均按既定设计飞行, 最大偏移距离控制在50 m以内, 航线弯曲度均小于1%。
3.1.2 航向、旁向重叠度
像片重叠部分是用来进行立体观测和像片连接的, 在航向方向必须要有三度重叠, 即同一地物需在连续的3张影像上出现, 以便于立体模型的连接和公共定向点的选择。而旁向重叠度是在2个航带模型进行连接时应用的。
采用机载POS辅助的全数字质检方法[14], 即通过对机载POS数据的解算得到实际飞行的航行轨迹和曝光点位置信息, 再输入相机像幅、像元尺寸、焦距和飞行高度等参数, 得到每张像片相对于测区平均高程的地面覆盖范围, 把该文件导入到以DEM为底图的工程中, 即可以直观地显示出顾及了地面起伏的实际覆盖范围, 通过人工目视选取最小的重叠区域进行量测, 如果其满足规范要求, 则其他的地方肯定可以满足。经质检本次作业航向重叠度最大为68%, 最小为58%, 旁向重叠介于25%~30%之间, 均符合有关规范要求。
3.1.3 旋偏角
飞行管理系统和自动陀螺平台相互交联, 能根据飞机的航向和航迹自动控制旋偏角。该项质检根据POS解算的Heading角与设计航向角的差值进行评价。经质检, 本次作业旋偏角最大为12° , 且连续不超过3片。其余均控制在5° 以内, 均符合有关规范要求。
3.1.4 航高
通过对测线相邻影像航高保持情况抽查的方法, 检验得出同一条航线相邻2张像片高差最大值均小于20 m, 最大航高与最小航高之差均小于40 m, 均满足规范要求。
3.1.5 覆盖范围
研究区航空遥感飞行范围覆盖情况是绝大部分航线超出图廓线至少2条基线长, 个别航线超出3~4条基线长; 旁向覆盖超出图廓线的范围为像幅的25%以上, 均满足规范要求。
对影像的检查主要通过对生成的浏览小影像进行分析, 经目视检查, 影像色彩丰富、颜色饱和、反差适中, 不同架次相同地物的颜色基调一致, 能够清晰辨认出与摄影分辨率相对应的地物影像细节, 正确地辨认出航空遥感像片上的各种地物类别, 精确地反映出被摄物体的轮廓。最终得到的平均地面空间分辨率为0.3 m, 有碎云和云影的像片数目不超过总数的0.6%。
3.3.1 线元素观测值的精度评估
以X坐标为例, POS系统X方向定位中误差表达式为
式中: n为参与检校的像片数;
POS观测值X、Y和Z 3个方向的定位中误差, 均可以利用式(2)进行计算。
3.3.2 角元素观测值的精度评估
姿态参数的观测误差按以下步骤进行:
(1)根据检校场像片的外方位元素(φ 为俯仰角, ω 为侧滚角, κ 为航向角)和系统检校参数, POS系统获取的姿态参数“ 真值” 的旋转矩阵
式中φ ε 、ω ε 、κ ε 分别为外方位元素的修正值。
(2)利用矩阵
(3)计算姿态观测误差
(4)计算姿态参数的中误差。中误差
按照上述步骤, 依次对每个架次POS观测值自身精度进行评定, POS观测值精度分析显示所有架次的IMU/GPS数据均在限值范围内(表1)。平面、高程和速度偏差限值分别为0.15 m、0.5 m和0.6 m/s。
| 表1 机载POS数据解算结果 Tab.1 Solution results of airborne POS data |
3.4.1 验证区空三加密
验证区空中三角测量运用经典的光束法平差模型解算加密点坐标。将POS数据引入空三工程, 进行相对定向模型连接点自动匹配, 之后进行基于POS数据的光束法空三严密平差, 平差计算后在立体模型下量测外业检查点的三维坐标, 与验证区控制点实测坐标进行比对得到实际精度。
3.4.2 定位精度对比
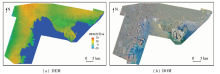
自由网平差合格后在立体模型下测量外业实测点的坐标, 与验证区控制点实测坐标进行比对, 得到利用检校后POS数据直接进行空三加密的模型实际精度。规范要求1:10 000的DOM平面中误差≤ 5 m, 1:10 000的二级DEM高程中误差≤ 1.7 m。利用检校后的POS数据直接进行空三加密的模型实际精度计算, 如表2所示, 其中Dx为北方向的差值, Dy为东方向的差值, Ds为平面差值, Dh为高程方向的差值。在立体模型下采集对应的24个精度验证区像控点的三维坐标, 与实测坐标对比, 其中平面中误差最大值为3.45 m, 最小值为0.18 m, 平均值为± 1.82 m; 高程中误差最大值为-2.60 m, 最小值为0.31 m, 平均值为± 1.61 m; 结果均满足规范要求。利用上述影像数据、POS数据制作的DEM和DOM成果如图5所示。
| 表2 基于机载POS的空三模型与实测点定位精度对比 Tab.2 Positioning accuracy comparison between aerial triangulationl model based on airborne POS and measured points |
 | 图5 1:10 000比例尺DEM和DOM成果图Fig.5 1:10 000 scale DEM and DOM results |
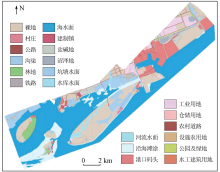
利用紧耦合机载POS技术获取高空间分辨率的航空遥感数据, 在此基础上将得到的外方位元素采用直接地理定位定向方式进行高精度DEM和DOM制作, 其成果可以针对海岸带断裂构造、潮滩、湿地、地表盐碱化和海岸线等要素开展信息提取和解译, 形成大比例尺遥感地质专题图、近海水深图和海陆交互带地形地貌无缝拼接成果, 在此基础上对区域环境进行综合分析研究, 为渤海海岸带综合地质调查提供航空物探遥感技术支持和服务, 后期为环渤海经济区城市群生态文明建设、重大工程与项目建设、海陆资源统筹规划、生态环境保护与防治、减灾防灾等方面的政府决策提供重要的科学依据, 为海洋地质调查提供高精度航空遥感数据资料遥感解译成果[15]。以全国第二次土地利用划分类型为基础, 采用GF-1和GF-2数据并结合本研究获取的高空间分辨率遥感影像, 对区内典型区域祥云岛的土地利用类型进行了1:10 000遥感解译, 将土地利用类型划分为10个一级地类和21个二级地类。土地利用类型解译成果如图6所示。
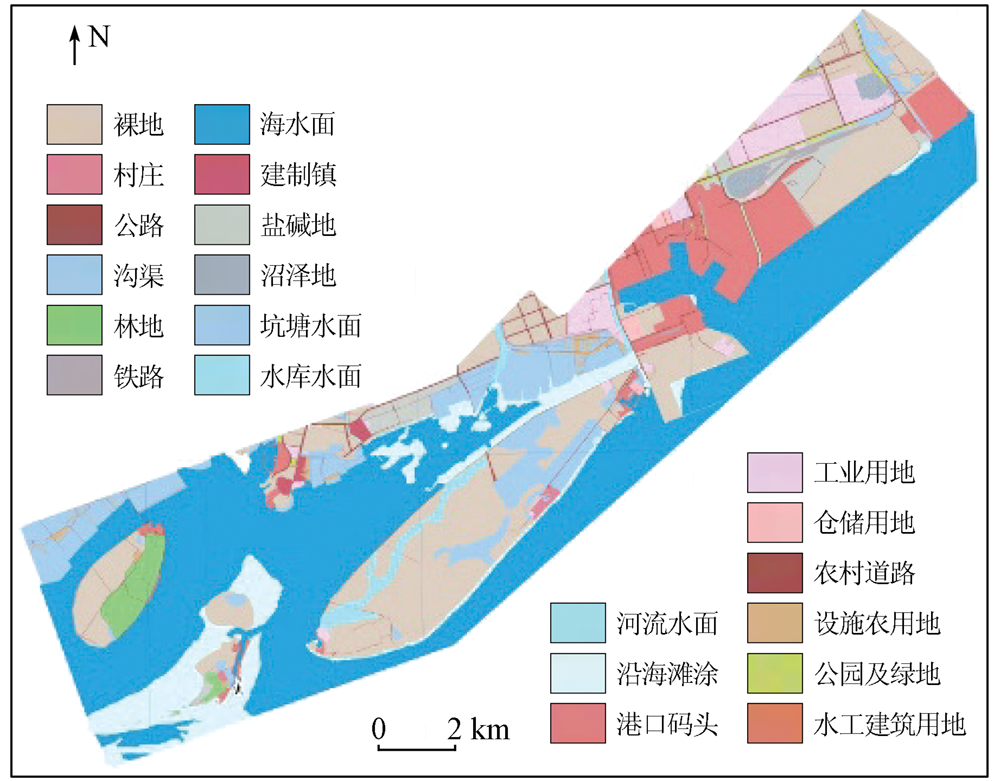 | 图6 土地利用类型解译成果Fig.6 Interpretation result of land utilization types |
在1:50 000解译的基础上, 利用本次成果在祥云岛地区进行了1:10 000土地利用类型、生态景观和海岸线滩涂的解译, 并对区内土地利用类型分布、土地景观分布以及海岸线滩涂分布进行了统计, 为该岛的保护和开发提供了详细的信息。其中海岸线滩涂解译成果如图7所示。
 | 图7 海岸线滩涂解译成果Fig.7 Interpretation result of coastline beaches |
(1)紧耦合机载POS技术的成功应用, 改变了长期以来航空遥感对地定位严重依赖地面控制的状况, 大幅缩短了航空遥感调查的生产周期, 降低了生产成本, 解决了无法对西部无人区、海岸带、滩涂、湿地和灾后地进行野外作业的技术难题, 与常规成图作业方式相比至少可减少40%以上的工作量, 缩短一半作业周期。
(2)直接地理定位技术在海岸带航空遥感调查中的首次成功应用, 使得在无地面控制点、距基站距离过远甚至飞行过程中卫星失锁的情况下, 仍可进行高质量数据采集, 并制作高精度成果图件, 极大地减少了地面工作量, 缩短工作周期, 提高工作效率。本研究所飞行覆盖面积为8 332 km2, 仅架设一台地面基站, 与飞行航摄区域最远距离达137 km, 所得数据精度经解算仍满足精度要求, 与此同时尝试了单点定位方式, 该方式的解算精度较有基站时下降15%~20%, 但仍可满足1:10 000比例尺的制图要求; 使用直接地理定位结果进行成果图件制作, 平面精度优于2.5 m, 高程精度优于2 m, 说明采用紧耦合技术解算的外方位元素可直接用于DEM和DOM制作而无需布设任何地面控制点, 解决了海岸带、滩涂地区难以布设控制点的难题; 在仅布设四角控制点的情况下, 平面和高程精度可迅速提高至优于1 m, 若研究区采用常规方式进行影像图制作则需要布设480个地面控制点, 说明该技术极大程度地减少了地面工作量, 提高了工作效率。
(3)紧耦合机载POS技术和直接地理定位方法已经成为现有航空遥感不可或缺的辅助手段。本次应用再一次证明了该方法的先进性和可靠性, 并进一步积累了工作和科研经验, 为后续该技术在海岸带无人机测量、水深测量和高光谱探测等方面的应用, 打下了良好的基础。通过本研究初步归纳出一套紧耦合直接地理定向技术的海洋地质调查技术流程和工作方法, 能在较短时间内完成从数据获取到成果图制作的过程, 其成果也可适用多搭载平台和多传感器的应用, 为新兴遥感技术在地质调查项目中的应用提供技术支撑和工作思路。
(责任编辑: 刘永权)
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|